机器人“厨师”尝了9道西红柿炒鸡蛋后 画出了一张味觉图
扫一扫
分享文章到微信

扫一扫
关注鹿财经网微信公众号
智东西5月7日消息,近日,英国剑桥大学的研究人员训练一个厨师机器人不断“咀嚼”并品尝食物,以此来模仿厨师的烹饪过程。

一道美味菜肴的诞生,依赖于厨师在烹饪过程中不断品尝味道、增减调料,在这个过程中,味觉就是人们判断食物味道的重要指标。
让机器人也能“边品尝边烹饪”,这虽然听起来有些荒诞,但该论文的第一作者、剑桥大学工程系的Grzegorz Sochacki说:“我们希望机器人能够理解味道的概念,这将使它们成为更好的厨师。”
研究人员开发了一个装有基于电导的味觉传感器的UR5机械臂的实验装置,通过混合食物模拟咀嚼、电流传导复现盐的味道,帮助机器人品尝食物的“味道”。

▲研究人员的实验装置
因此,经过训练的机器人“厨师”可以在咀嚼过程的不同阶段品尝食物的盐度,并将所含盐度的信息生成数据发送给计算机,然后生成可视化的味道数据图像。


▲实验过程
他们的研究结果可能有助于开发自动化或半自动化的食物制备,它可以帮助机器人学习什么味道好,什么味道不好。
二、9份菜各品尝3次,生成可视化味道图像
再现人类的咀嚼过程还可以提取更多咀嚼过程中的信息。研究人员称,在食品机械加工的几种状态下品尝可以显著提高具有不同数量相同成分的食品的分类性能。
为了证明上述结论,研究人员模拟人类的品尝过程建模,测量“咀嚼”过程中食物在不同阶段的味道并生成数据。咀嚼是粉碎和研磨食物的过程,其主要目的是减小食物颗粒的平均尺寸,同时,较小的颗粒也能为消化酶提供更大的表面积来发挥作用。因此,咀嚼在品尝过程中起着非常重要的作用,研究人员设置混合器来模拟该过程。
在味道的测量上,机器人通过电导传感器重现盐的味道,盐度会随着离子浓度、离子迁移率和离子电荷的增加而增加。
考虑到人体舌头表面有多个感知的受体,研究人员会在实验中多个点品尝并将味道表示为一系列测量值,为了模仿机器人厨师咀嚼和品尝的人类过程,研究人员将一个类似于盐度传感器的探针连接到机器人手臂上,传感器就可以移动到多个位置上,该样本的位置和数据最终生成包含味道数据的图像。
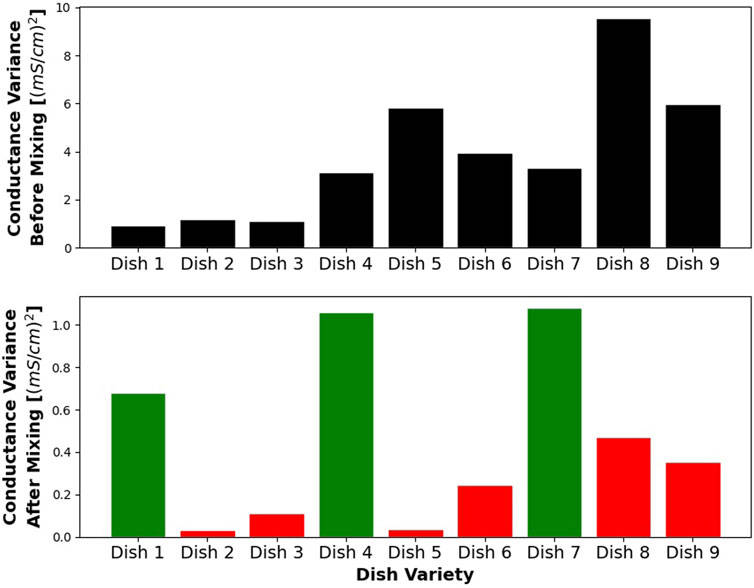
▲9道菜混合前后盐度测量值的差异
研究人员准备了9种盐度和西红柿含量不等的西红柿炒鸡蛋,随后机器人使用探针来“品尝”菜肴,并在几秒钟内返回读数。
该读数也就作为味道的数据信息来生成图像。该图像基于2个参数,分别是测试点的数量和盘子大小,测试点呈正方形网格分布。

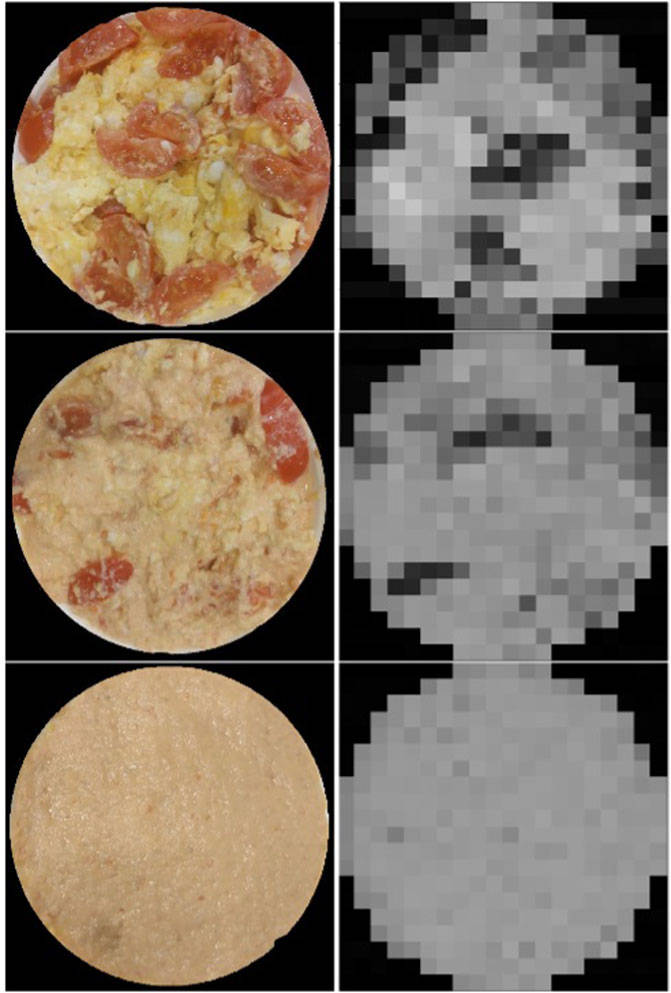
▲不同混合阶段中不同添加剂菜品的电导测量直方图。
实验过程中,混合过程是无法控制每道菜都完全相同的,因此,研究人员在实验过程中会让机器人对每道菜品尝3次,但研究人员只使用第一次和最后一次品尝进行分类,以提高实验的可重复性。
第一次品尝是在未混合的食物上进行的,然后,机器人将样品混合几秒钟并再次品尝,此测量仅用于可视化。最后机器人在最大RPM下再混合60秒后,再次品尝这道菜,咀嚼不同时刻产生不同读数进一步丰富味觉图的数据信息。
三、未混合食材盐度差距明显,但无法分辨同质化样本
从实验生成的味觉图中可以看出,未混合的样品会显示出非常明显的电导率降低区域,也就是没有盐的地方,这些区域会和鸡蛋之间存在非常清晰的边界。最后一个样本的数据电导分布则相对均匀,其电导值介于番茄和鸡蛋的电导之间。
投稿邮箱:lukejiwang@163.com 详情访问鹿财经网:http://www.lucaijing.com.cn


 特斯拉“True Unboxed Process 2.0”专利获批,马斯克
特斯拉“True Unboxed Process 2.0”专利获批,马斯克
原标题:特斯拉True Unboxed Process 2.0专利获批,马斯克:新流程或5秒产一辆车且
科技说2025-09-27